

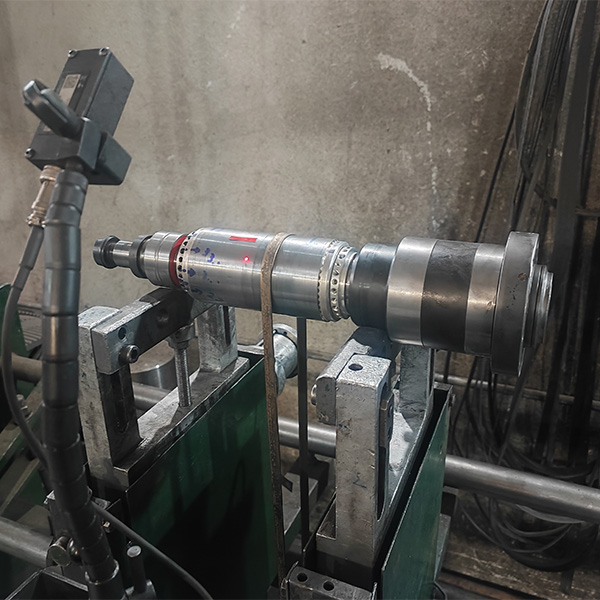




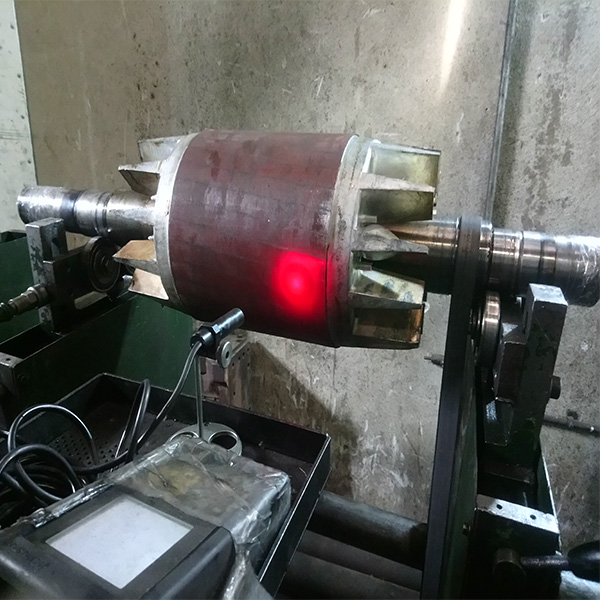




مشکلات مکانیکی از جمله بالانس دینامیکی و استاتیکی باعت ایجاد دما،ارتعاش و صدا در موتور های الکتریکی میشود.یکی از خدمات مجموعه فنی مهندسی دوار ماشین پارس انجام تعمیرات اساسی،بالانس دینامیکی و همراستایی جهت کارکرد ایده ال ماشین های دوار میباشد.
جرم : 500 گرم تا 3500 کیلوگرم در کارگاه شادآباد - جرم 3500 کیلو گرم تا 20000 کیلوگرم در گارگاه باغستان شهریار
بدون محدودیت در طول و قطر
الکتروموتورها از اجزای حیاتی در سیستمهای صنعتی و تجاری هستند که وظیفه تبدیل انرژی الکتریکی به انرژی مکانیکی را بر عهده دارند. از الکتروموتورها در کاربردهای مختلفی مانند پمپها، فنها، کمپرسورها و ماشینآلات صنعتی استفاده میشود. عملکرد صحیح و بهینه الکتروموتورها به عوامل مختلفی بستگی دارد، یکی از مهمترین این عوامل بالانس الکتروموتور است. بالانس صحیح الکتروموتور نه تنها موجب کاهش لرزش و نویز میشود، بلکه به افزایش عمر مفید و کارایی دستگاه نیز کمک میکند. در این مقاله به بررسی اهمیت بالانس الکتروموتور، روشهای مختلف بالانس، تجهیزات مورد استفاده، چالشها و راهکارهای مرتبط با این فرآیند میپردازیم.
1. اهمیت بالانس الکتروموتور
1.1. کاهش لرزش و نویز
یکی از اصلیترین دلایل اهمیت بالانس الکتروموتور، کاهش لرزش و نویز است. الکتروموتورهایی که به درستی بالانس نشدهاند، در حین کارکرد دچار لرزشهای شدید و ایجاد نویز میشوند. این لرزشها میتوانند به سرعت به سایر اجزای سیستم منتقل شده و موجب خرابی و کاهش عمر مفید آنها شوند. لرزشها نه تنها به کیفیت عملکرد دستگاه آسیب میرسانند، بلکه میتوانند منجر به کاهش بهرهوری و افزایش هزینههای تعمیرات شوند. با بالانس دقیق الکتروموتور، این لرزشها و نویزها به حداقل میرسند، که نتیجه آن عملکرد نرمتر و بیصداتر دستگاه است.
1.2. افزایش عمر مفید قطعات
نابالانسی در الکتروموتور باعث ایجاد بارهای غیرعادی و نامتعادل بر روی اجزای مختلف دستگاه میشود. این بارهای اضافی میتوانند به سایش زودرس قطعات و خرابیهای پیش از موعد منجر شوند. با بالانس صحیح الکتروموتور، فشارهای غیرضروری کاهش مییابد و در نتیجه، عمر مفید قطعات افزایش مییابد. این امر منجر به کاهش نیاز به تعمیرات مکرر و هزینههای ناشی از آن میشود و بهبود کارایی کلی سیستم را به همراه دارد.
1.3. بهبود کارایی و کاهش مصرف انرژی
الکتروموتورهایی که به درستی بالانس نشدهاند، نمیتوانند به طور کامل وظیفه خود را انجام دهند و این امر موجب کاهش کارایی و افزایش مصرف انرژی میشود. بالانس صحیح الکتروموتور منجر به بهینهسازی عملکرد آن و کاهش مصرف انرژی میشود. این امر به ویژه در صنایع بزرگی که از الکتروموتورهای پرقدرت استفاده میکنند، اهمیت دارد، زیرا کاهش مصرف انرژی میتواند تأثیر قابلتوجهی در کاهش هزینههای عملیاتی داشته باشد.
2. فرآیند بالانس الکتروموتور
2.1. شناسایی نابالانسی
اولین گام در فرآیند بالانس الکتروموتور، شناسایی نابالانسی است. نابالانسی میتواند به دلایل مختلفی از جمله تولید نامناسب، سایش قطعات، یا نصب نادرست اجزا ایجاد شود. برای شناسایی نابالانسی، از تجهیزات مختلفی مانند دستگاههای سنجش لرزش و آنالیز ارتعاشات استفاده میشود. این تجهیزات قادرند نقاط دقیق نابالانسی را شناسایی کرده و اطلاعات دقیقی درباره نوع و میزان نابالانسی فراهم کنند.
2.2. انواع نابالانسی در الکتروموتور
نابالانسی در الکتروموتورها به دو نوع اصلی تقسیم میشود:
-
نابالانسی استاتیکی: زمانی رخ میدهد که جرم روتور به طور نابرابر در اطراف محور چرخش توزیع شده باشد. این نوع نابالانسی باعث میشود که مرکز ثقل روتور از محور چرخش فاصله داشته باشد، که منجر به ایجاد نیروهای گریز از مرکز و ارتعاشات ناخواسته میشود.
-
نابالانسی دینامیکی: این نوع نابالانسی زمانی رخ میدهد که توزیع جرم در طول محور چرخش نابرابر باشد. نابالانسی دینامیکی میتواند باعث ایجاد ارتعاشات پیچیدهتر و نیروهای ناپایدار در سیستم شود.
2.3. روشهای بالانس الکتروموتور
بسته به نوع و میزان نابالانسی، روشهای مختلفی برای بالانس کردن الکتروموتورها استفاده میشود:
-
بالانس استاتیکی: در این روش، روتور الکتروموتور در حالت سکون قرار میگیرد و نقاطی که جرم اضافی دارند شناسایی و اصلاح میشوند. این روش برای شناسایی نابالانسیهای ابتدایی و رفع آنها استفاده میشود.
-
بالانس دینامیکی: این روش برای الکتروموتورهایی که در سرعتهای بالا کار میکنند، استفاده میشود. در بالانس دینامیکی، روتور در حال چرخش بالانس میشود و نقاط نابالانس در طول محور چرخش شناسایی و اصلاح میشوند. این روش دقیقتر از بالانس استاتیکی است و میتواند نابالانسیهای پیچیدهتری را شناسایی کند.
-
استفاده از وزنههای بالانس: در این روش، وزنههای بالانس به نقاط خاصی از روتور الکتروموتور متصل میشوند تا توزیع جرم بهینه شود. این وزنهها معمولاً در نقاط مشخص شده روی روتور نصب میشوند تا نابالانسیهای استاتیکی و دینامیکی را جبران کنند.
3. تجهیزات مورد استفاده در بالانس الکتروموتور
3.1. دستگاههای سنجش لرزش
دستگاههای سنجش لرزش برای اندازهگیری ارتعاشات و شناسایی نابالانسیهای موجود در الکتروموتورها استفاده میشوند. این دستگاهها میتوانند دادههای دقیقی درباره میزان لرزش و نقاط خاصی که دچار نابالانسی هستند، ارائه دهند. این دادهها به مهندسان کمک میکند تا تصمیمات دقیقتری درباره نحوه رفع نابالانسی بگیرند.
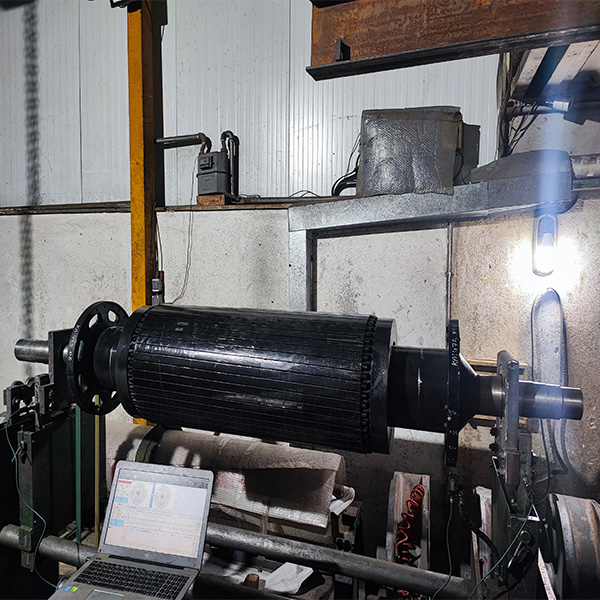
3.2. دستگاههای بالانس دینامیکی
دستگاههای بالانس دینامیکی برای شناسایی و اصلاح نابالانسیهای دینامیکی در الکتروموتورها استفاده میشوند. این دستگاهها معمولاً شامل یک سیستم کنترل کامپیوتری هستند که دادههای مربوط به ارتعاشات و نابالانسیها را تحلیل کرده و اقدامات لازم برای اصلاح آنها را پیشنهاد میدهد. دستگاههای بالانس دینامیکی از جمله مهمترین تجهیزات در فرآیند بالانس الکتروموتور محسوب میشوند و دقت بالایی در رفع نابالانسیهای پیچیده دارند.
3.3. وزنههای بالانس
وزنههای بالانس معمولاً از مواد مقاوم و با دقت بالا ساخته میشوند و به منظور تعدیل توزیع جرم در روتور الکتروموتورها به کار میروند. این وزنهها به گونهای طراحی شدهاند که به راحتی نصب شده و در صورت نیاز قابل تنظیم باشند. انتخاب و نصب صحیح وزنههای بالانس یکی از مراحل حیاتی در فرآیند بالانس الکتروموتور است.
4. چالشها و راهکارها در بالانس الکتروموتور
4.1. تغییرات محیطی
یکی از چالشهای مهم در بالانس الکتروموتور، تغییرات محیطی مانند دما و رطوبت است که میتواند بر توزیع جرم روتور تأثیر بگذارد. این تغییرات ممکن است باعث نابالانسی مجدد شوند. برای مقابله با این چالش، انجام بازبینیها و بالانس منظم توصیه میشود. همچنین، استفاده از مواد و تجهیزات مقاوم در برابر تغییرات محیطی میتواند به کاهش اثرات این تغییرات کمک کند.
4.2. سایش و تجمع مواد
سایش قطعات و تجمع مواد در داخل الکتروموتور میتواند منجر به ایجاد نابالانسی شود. این مشکل بهویژه در محیطهای صنعتی و در الکتروموتورهایی که در شرایط سخت و با بار زیاد کار میکنند، شایع است. نگهداری منظم و تمیزکاری دورهای میتواند به جلوگیری از این مشکلات کمک کند. همچنین، استفاده از پوششهای ضد سایش و ضد خوردگی میتواند عمر مفید الکتروموتور را افزایش دهد.
4.3. هزینههای بالانس
بالانس الکتروموتورها، بهویژه در مقیاس صنعتی، ممکن است هزینهبر باشد. استفاده از تجهیزات دقیق و انجام عملیات بالانس توسط تکنسینهای مجرب میتواند هزینههای اولیه را افزایش دهد، اما این هزینهها در مقابل افزایش عمر مفید دستگاه و کاهش نیاز به تعمیرات مکرر، مقرون به صرفه خواهد بود. برای مدیریت بهتر هزینهها، برنامهریزی دقیق برای انجام بالانس در زمانهای مناسب و پیشگیری از بروز نابالانسیهای شدید میتواند مؤثر باشد.
نتیجهگیری
بالانس الکتروموتور یکی از فرآیندهای حیاتی برای حفظ عملکرد بهینه و افزایش عمر مفید سیستمهای مکانیکی در صنایع مختلف است. انجام صحیح این فرآیند نه تنها باعث کاهش لرزش و نویز میشود، بلکه به بهبود کارایی، کاهش مصرف انرژی و جلوگیری از خرابیهای جدی کمک میکند. استفاده از تجهیزات دقیق و فناوریهای نوین در بالانس الکتروموتور، به مهندسان این امکان را میدهد که با دقت بیشتری نابالانسیها را شناسایی و رفع کنند. در نهایت، بالانس منظم و بهموقع الکتروموتورها یک سرمایهگذاری مهم برای حفظ سلامت و کارایی تجهیزات است که میتواند در درازمدت به صرفهجویی در هزینهها و افزایش عمر مفید سیستمها کمک کند.
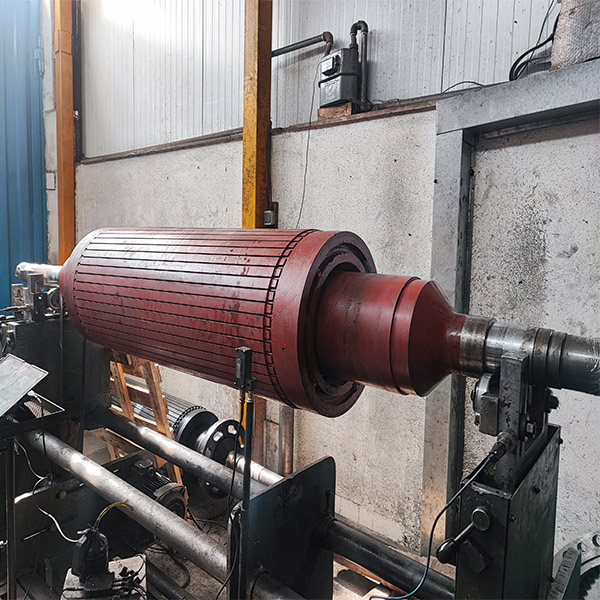
روتور (Rotor) یکی از اجزای اصلی الکتروموتور است که نقش حیاتی در تولید و انتقال انرژی مکانیکی دارد. الکتروموتور یک دستگاه الکتریکی است که انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند، و روتور به عنوان بخشی از این سیستم، انرژی مکانیکی را به شکل حرکت چرخشی فراهم میکند. در این مقاله، به بررسی ساختار، عملکرد، و اهمیت روتور در الکتروموتور پرداخته میشود.
ساختار روتور
روتور به طور کلی از چندین بخش اصلی تشکیل شده است:
-
هسته روتور: هسته روتور از صفحات نازک فولادی ساخته شده است که به صورت لایهلایه بر روی هم قرار گرفتهاند. این ساختار به منظور کاهش تلفات انرژی به دلیل جریانهای گردابی (Eddy currents) طراحی شده است.
-
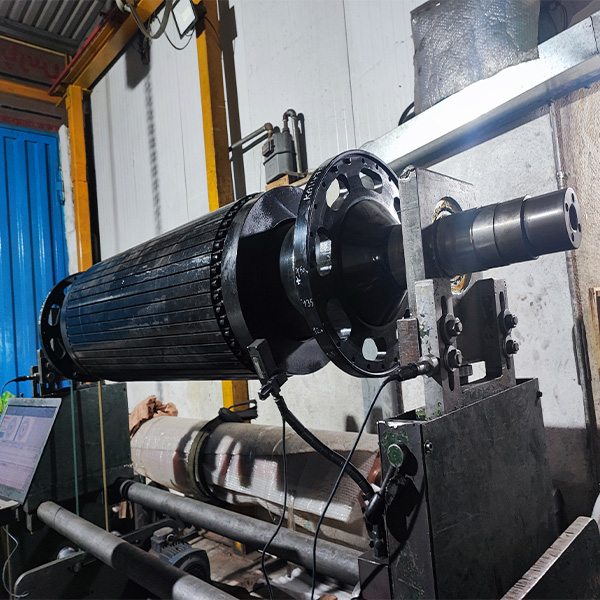
میلههای مسی یا آلومینیومی: در روتورهای قفسی (Squirrel-Cage Rotors)، میلههای مسی یا آلومینیومی به صورت موازی در هسته روتور قرار گرفتهاند و به دو انتهای روتور متصل هستند. این میلهها وظیفه دارند که جریان الکتریکی را درون روتور ایجاد کنند.
-
حلقههای انتهایی: این حلقهها در انتهای میلههای روتور قرار میگیرند و باعث اتصال مکانیکی و الکتریکی میلهها به یکدیگر میشوند.
عملکرد روتور
روتور بخشی از الکتروموتور است که درون استاتور قرار میگیرد و به وسیله میدان مغناطیسی ایجاد شده توسط استاتور به حرکت در میآید. وقتی جریان الکتریکی از سیمپیچهای استاتور عبور میکند، میدان مغناطیسی در اطراف روتور ایجاد میشود. این میدان مغناطیسی باعث القای جریان در میلههای روتور میشود و جریان ایجاد شده در روتور با میدان مغناطیسی تعامل میکند و در نتیجه، گشتاوری ایجاد میشود که روتور را به چرخش درمیآورد.
این حرکت چرخشی روتور باعث میشود که انرژی الکتریکی به انرژی مکانیکی تبدیل شود و الکتروموتور بتواند برای انجام کارهای مختلف مانند چرخاندن پمپها، فنها، و دیگر دستگاههای صنعتی استفاده شود.
انواع روتور
روتورهای الکتروموتور به طور کلی به دو نوع اصلی تقسیم میشوند:
-
روتور قفسی (Squirrel-Cage Rotor): این نوع روتور معمولاً در موتورهای القایی استفاده میشود و به دلیل سادگی ساخت و کارایی بالا بسیار رایج است.
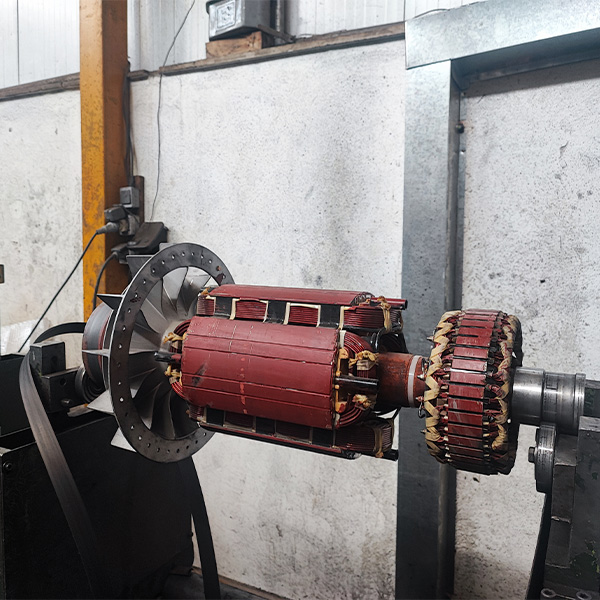
-
روتور سیمپیچی شده (Wound Rotor): این نوع روتور دارای سیمپیچهای مجزا است که به حلقههای لغزان متصل هستند و امکان کنترل بیشتری بر سرعت و گشتاور موتور فراهم میکند.
اهمیت روتور
روتور نقش حیاتی در عملکرد الکتروموتور ایفا میکند. کارایی و عمر مفید الکتروموتور به کیفیت ساخت و طراحی روتور بستگی دارد. یک روتور با طراحی خوب میتواند موجب افزایش کارایی موتور و کاهش تلفات انرژی شود. همچنین، استفاده از مواد با کیفیت در ساخت روتور میتواند مقاومت در برابر سایش و حرارت را افزایش داده و طول عمر موتور را بهبود بخشد.
نتیجهگیری
روتور یکی از اجزای کلیدی الکتروموتور است که با تبدیل انرژی الکتریکی به انرژی مکانیکی، نقش مهمی در عملکرد دستگاههای صنعتی و خانگی ایفا میکند. شناخت صحیح از ساختار و عملکرد روتور میتواند به بهبود کارایی و طول عمر الکتروموتورها کمک کند و در نتیجه، هزینههای نگهداری و بهرهبرداری از این دستگاهها را کاهش دهد.